
코드로 물리 세계를 정복하다: 드론 비행 제어 최적화 및 캘리브레이션
지난번 준영님이 우리집 요새화 프로젝트에서 파이썬으로 토리 드론 제어 실습 후에 드론 제어를 고도화를 하여 발표했습니다. 단순한 이륙을 넘어, 내가 설계한 경로를 한 치의 오차 없이 주행하는 '정밀 제어'는 드론 공학의 핵심입니다. 파이썬 코딩을 통해 소프트웨어의 논리를 하드웨어의 물리적 움직임으로 완벽하게 구현해낸 드론 2차 실습 프로젝트의 상세 과정을 소개합니다.
프로젝트의 시작: 정밀 제어와 오차 보정
이번 프로젝트의 테마는 '최적화(Optimization)'와 '캘리브레이션(Calibration)'입니다. 파이썬 기반의 자율 비행을 구현할 때 가장 큰 걸림돌이 되는 하드웨어 오차 문제를 어떻게 해결했는지에 초점을 맞추었습니다.
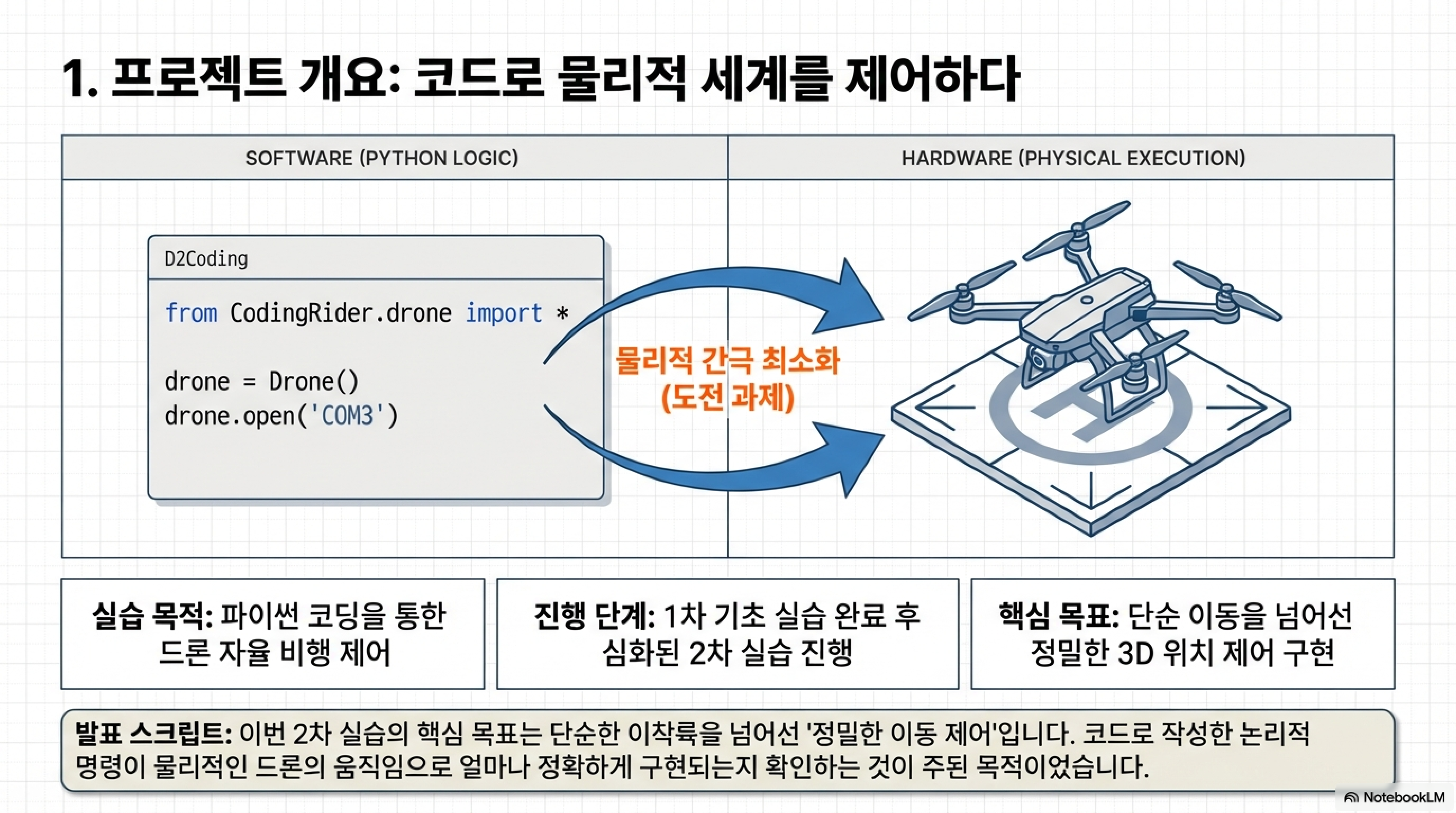
프로젝트 개요: 소프트웨어와 하드웨어의 결합
• 핵심 목표: 단순 이동이 아닌 3D 공간에서의 정밀한 위치 제어.
• 도전 과제: 파이썬 로직(Software)과 실제 모터의 회전(Hardware) 사이의 물리적 간극을 최소화하는 '사이버-물리 시스템(CPS)' 구축이 이번 실습의 본질입니다.
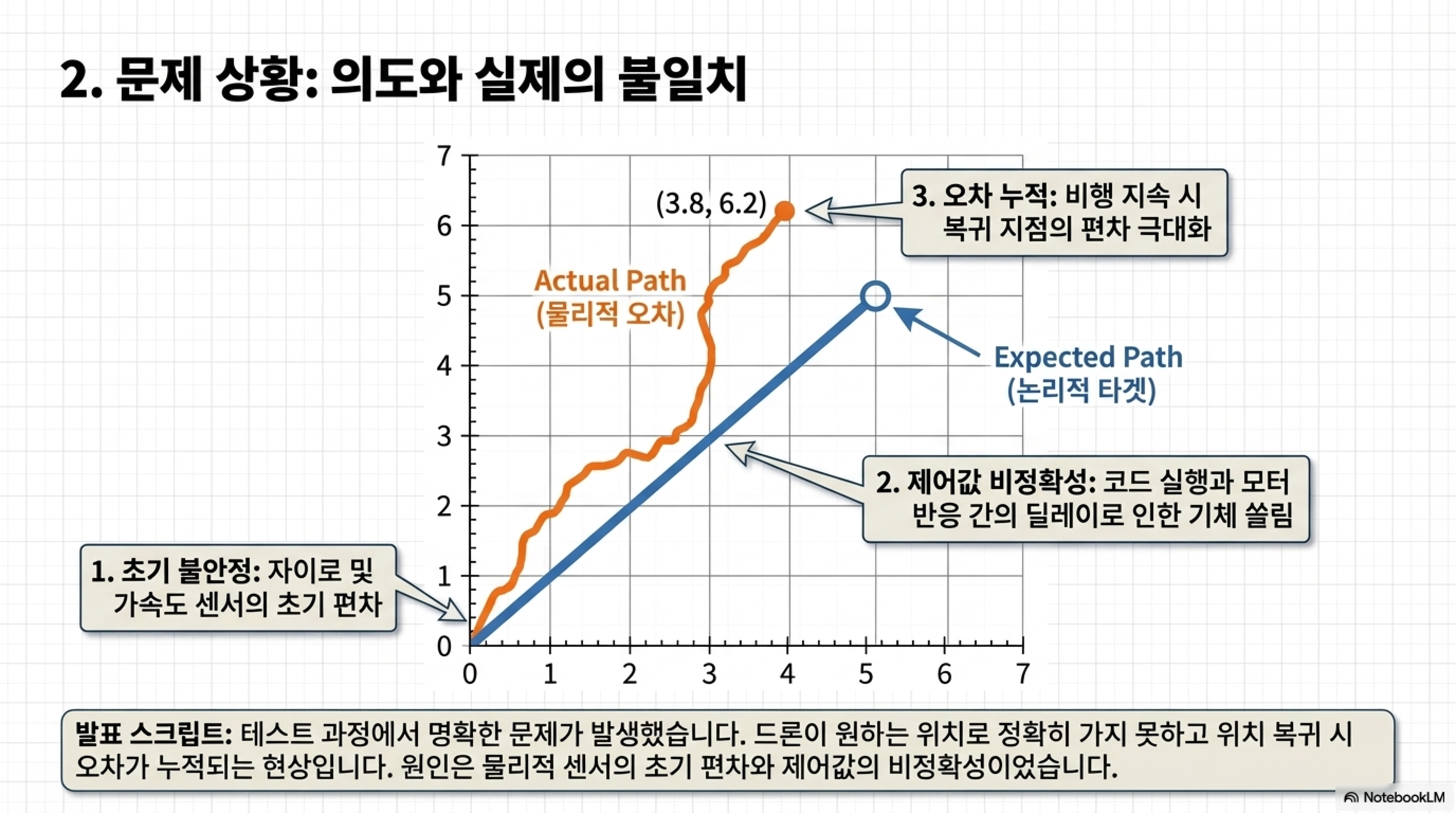
문제 진단: 왜 드론은 내 마음대로 움직이지 않을까?
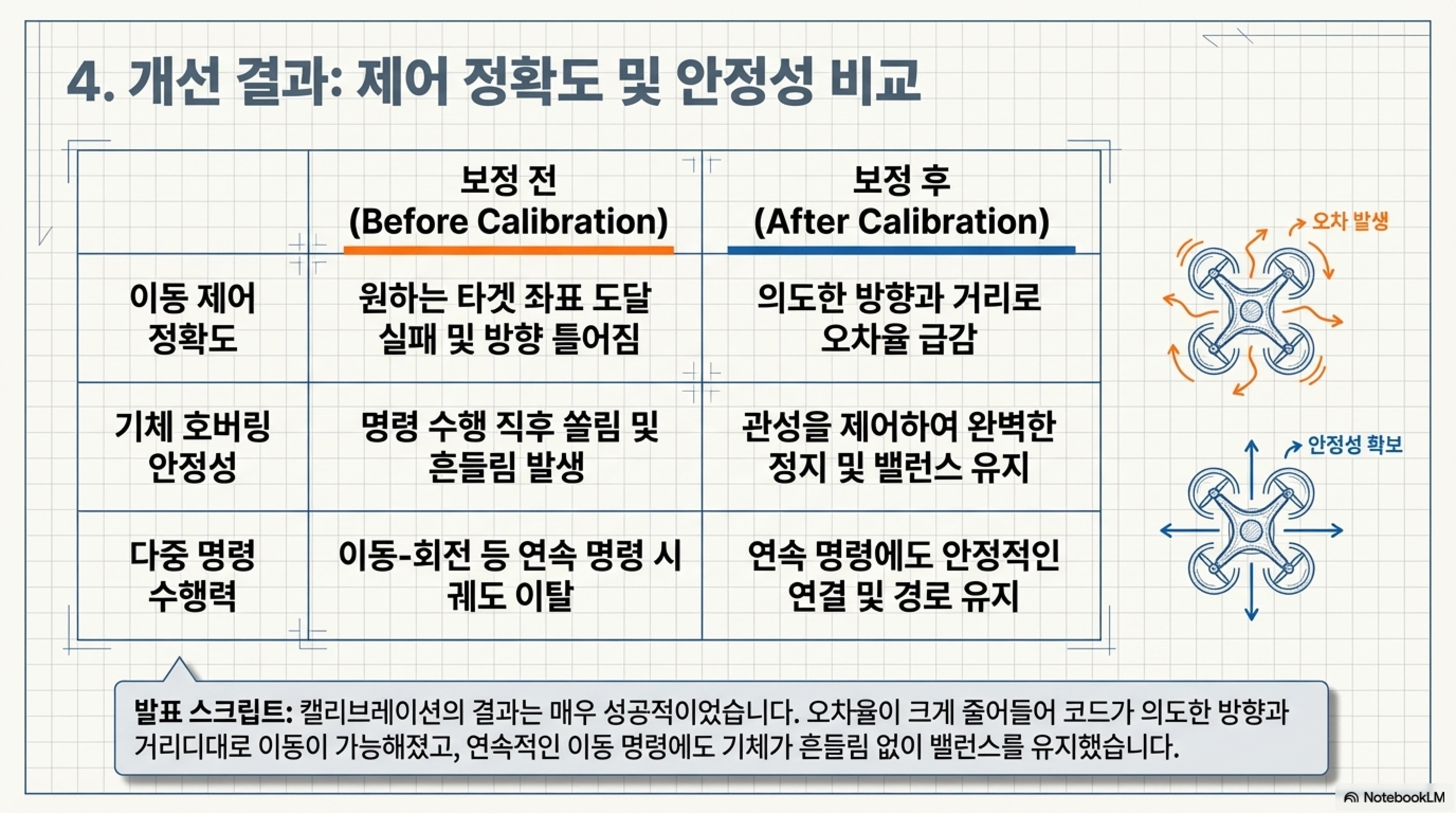
이론상 완벽한 코드도 실제 기체에 입력하면 예상치 못한 반응을 보입니다. 최적화 전, 실습에서 발견된 두 가지 치명적 문제는 다음과 같았습니다.
• 누적되는 센서 불안정: 초기 센서값이 미세하게 흔들리면, 고도가 높아질수록 그 오차가 기하급수적으로 커집니다.
• 고질적인 드리프트(Drift): 수직 상승 명령(Z축)을 내려도 기체가 자꾸 왼쪽으로 쏠리는 현상이 발생하여, 결국 타겟 좌표 도달에 실패하게 됩니다.
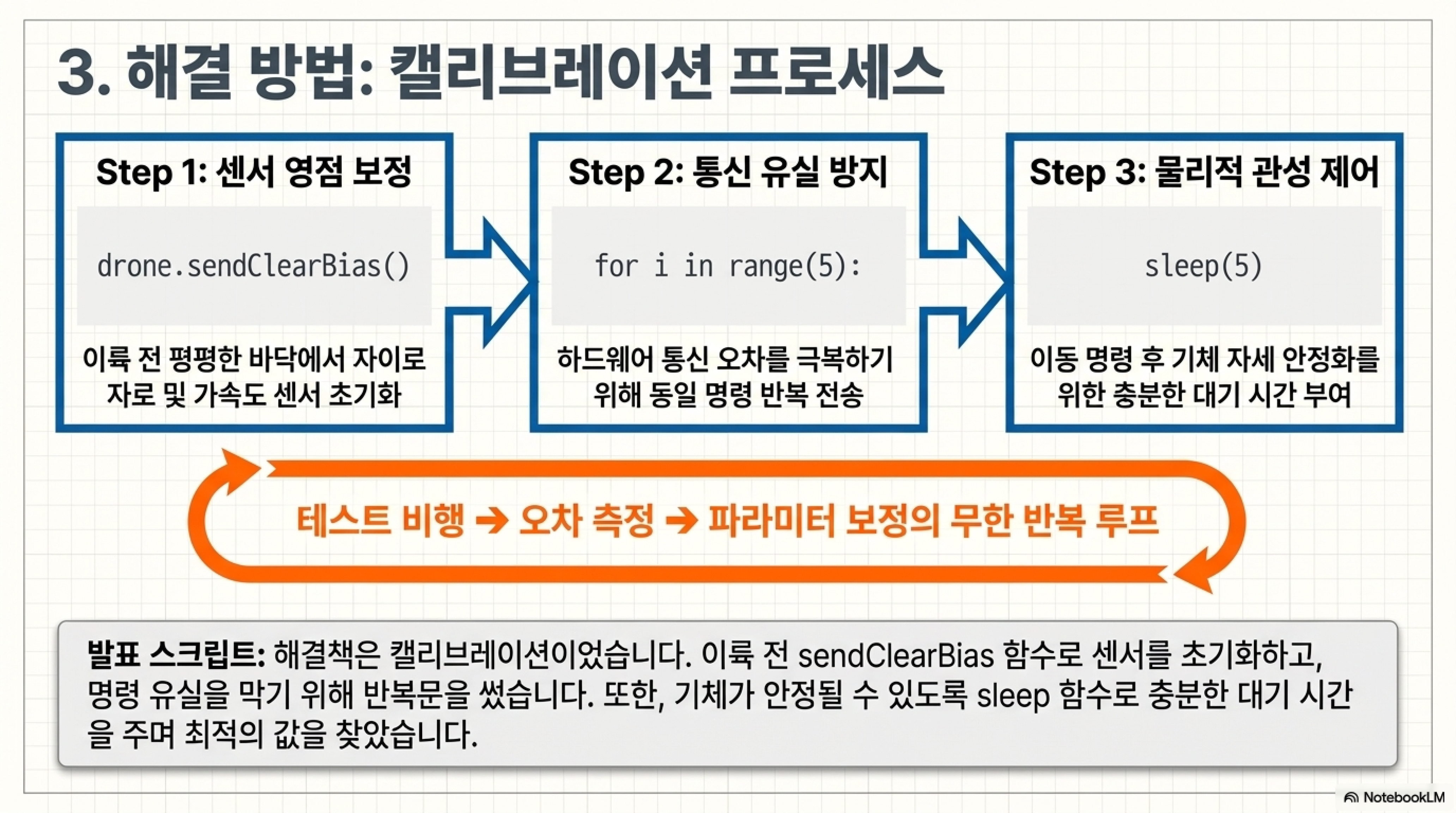
해결의 열쇠: 캘리브레이션과 실행 격차(Sleep)
문제 해결을 위해 약 40분간의 데이터 분석과 자료 조사를 통해 두 가지 결정적인 해결책을 적용했습니다.
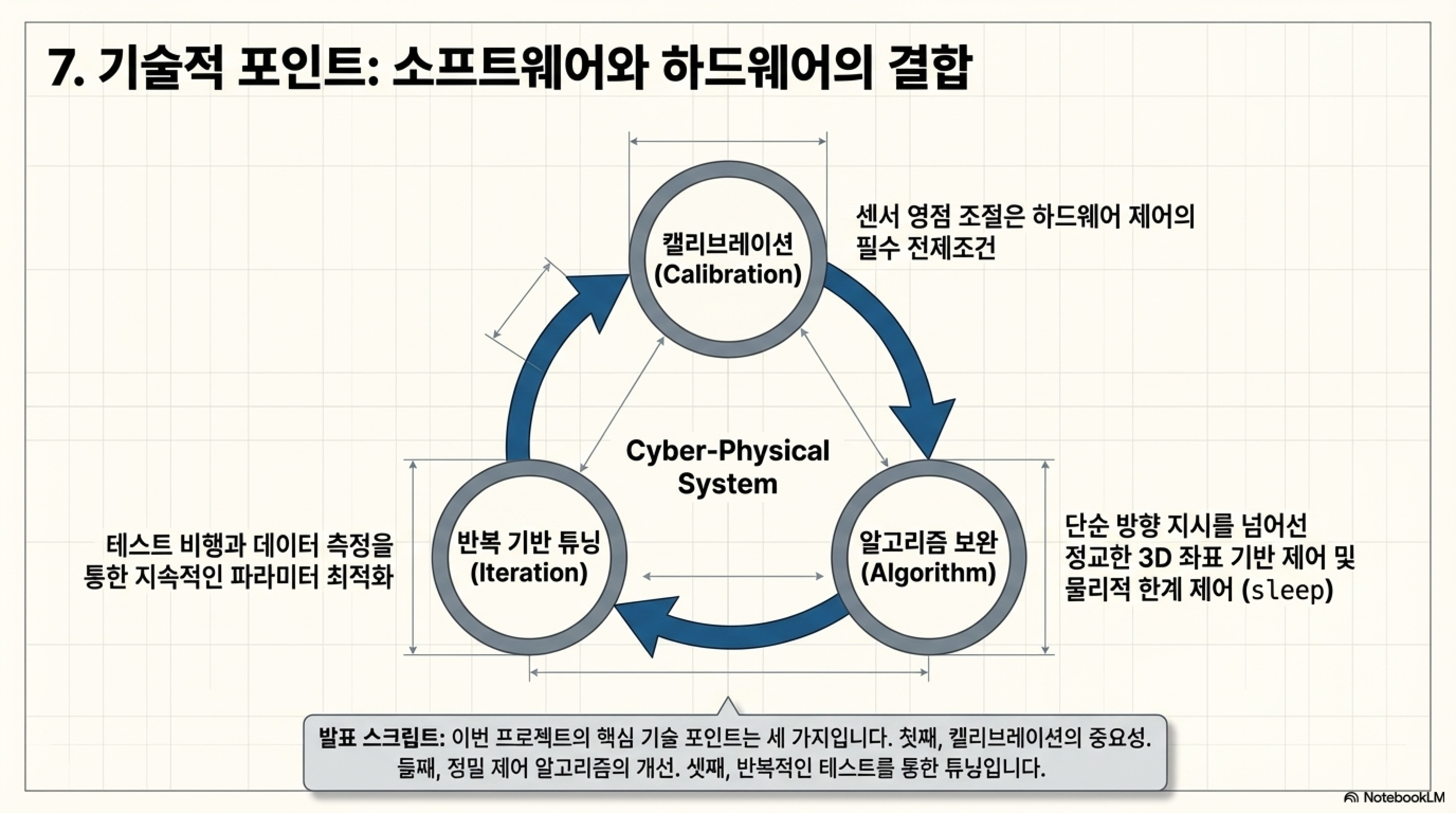
① 하드웨어 캘리브레이션 (Calibration) 센서의 영점을 다시 잡는 과정입니다. 자이로(Gyro) 센서와 가속도 센서가 현재의 지면을 완벽한 '평면'으로 인식하도록 재조정하여 드리프트 현상의 근본 원인을 제거했습니다.
② 명령어 간 실행 격차(Time Sleep) 최적화 가장 중요한 기술적 발견입니다. 코드 실행 속도는 빛의 속도에 가깝지만, 드론의 모터가 물리적으로 반응하는 데는 시간이 필요합니다.
• 조치: 각 명령어 사이에 적절한 대기 시간(time.sleep)을 추가했습니다. 이를 통해 첫 번째 명령이 물리적으로 완료된 후 두 번째 명령이 수행되도록 하여 제어의 안정성을 확보했습니다.
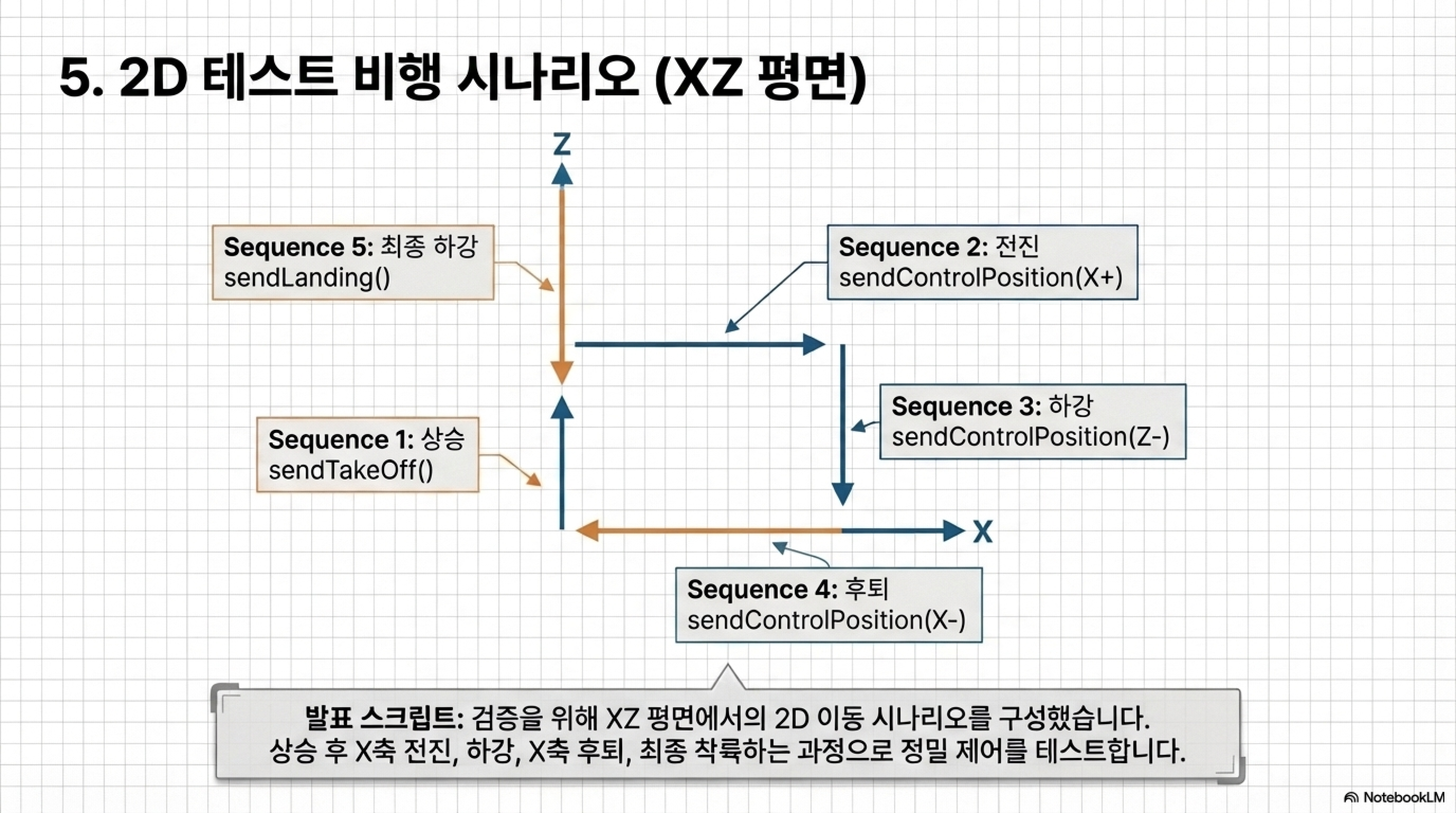
검증 시나리오: XZ 평면의 정밀 주행
해결책의 유효성을 검증하기 위해 XZ 평면에서의 2D 복합 이동 시나리오를 설계했습니다.
• Sequence 1 (상승): 캘리브레이션 덕분에 흔들림 없는 수직 상승 달성.
• Sequence 2 (전진): 지정된 X축 좌표만큼 정확하게 이동.
• Sequence 3 (하강/후퇴): 공중에서 고도를 낮춘 후, 다시 뒤로 이동하여 이륙 지점을 향함.
• 핵심 로직: sendControlPosition 함수를 사용하여 단순 속도 제어가 아닌 ‘위치 기반 제어’를 테스트했습니다.
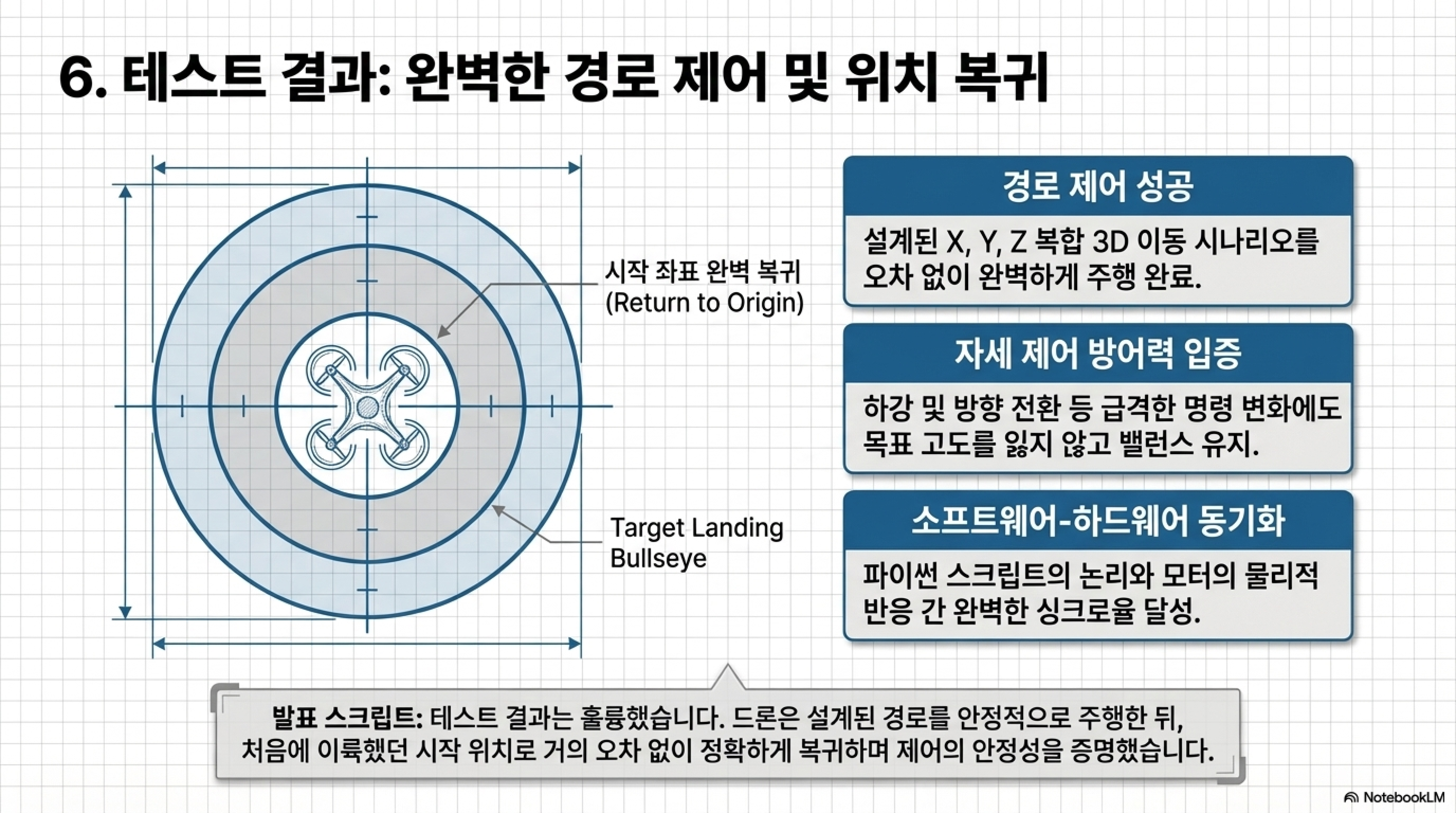
테스트 결과: 완벽한 경로 제어 및 복귀
테스트 결과는 완벽했습니다. 설계된 복합 3D 이동 시나리오를 오차 없이 완벽하게 소화해냈습니다.
• 완벽한 복귀: 드론이 모든 기동을 마친 후 처음 이륙했던 지점(Origin)으로 정확히 돌아와 착륙했습니다.
• 방어력 입증: 하강이나 급격한 방향 전환 시에도 고도가 튀거나 밸런스가 무너지지 않는 강력한 ‘자세 제어 방어력’을 보여주었습니다.
• 싱크로율 100%: 파이썬 스크립트의 논리적 시간과 드론의 물리적 반응 시간이 완벽하게 동기화되었음을 입증했습니다.
기술적 통찰과 향후 계획
이번 프로젝트는 실내 환경에서의 완벽한 제어를 확인한 성공적인 사례입니다. 하지만 실제 현장은 더 가혹합니다.
• 환경 변수 제어: 실내 테스트를 넘어 바람, 기온 등 유체역학적 변수가 존재하는 실외 환경으로의 확장을 준비합니다. (선풍기를 활용한 ‘강제 풍압 테스트’ 등 흥미로운 아이디어도 논의되었습니다!)
• 경로 커스터마이징: 테라(Terra) 비행 경로 매핑 기술을 결합하여, 사용자가 원하는 최적의 경로를 직접 커스터마이징하는 지능형 드론 시스템으로 발전시킬 계획입니다.
지능은 제어를 통해 완성됩니다.
비주얼센터 콘텐츠팀 준영님의 이번 프로젝트는 AI와 코딩이 단순히 화면 속의 숫자에 머물지 않고, 어떻게 실제 물리적인 ‘물체’를 지배하고 다룰 수 있는지를 명확히 보여주었습니다. 캘리브레이션이라는 기본과 실행 간격이라는 디테일이 만든 차이가 결국 ‘완벽한 복귀’라는 결과로 나타난 것입니다.